MATLABで『カルマンフィルタ』2章:ローカルレベルモデル
最終更新:2021/06/08
理論の説明ではなく, 実装に焦点をあてた記事.
非専門家が書いています. 十分に批判的に読んで頂くようお願いいたします. 間違い・疑問点などあれば, ぜひコンタクトフォームへ連絡いただけると幸いです.
モデル
シンプルな単変量時系列を扱うモデル. 観測量を $y_1, \ldots, y_n$ とする. そして, 観測量は状態量 $\alpha_t$ にホワイトノイズ $\ve_t$ がのったもの, 状態量の更新も同様にホワイトノイズ $\eta_t$ が乗るとする. するとモデルは,
となる. ここで, 初期状態 $\alpha_t$ についての情報はないが, とりあえず平均 $a_1$, 分散 $P_1$ に従うとする.
フィルタリング
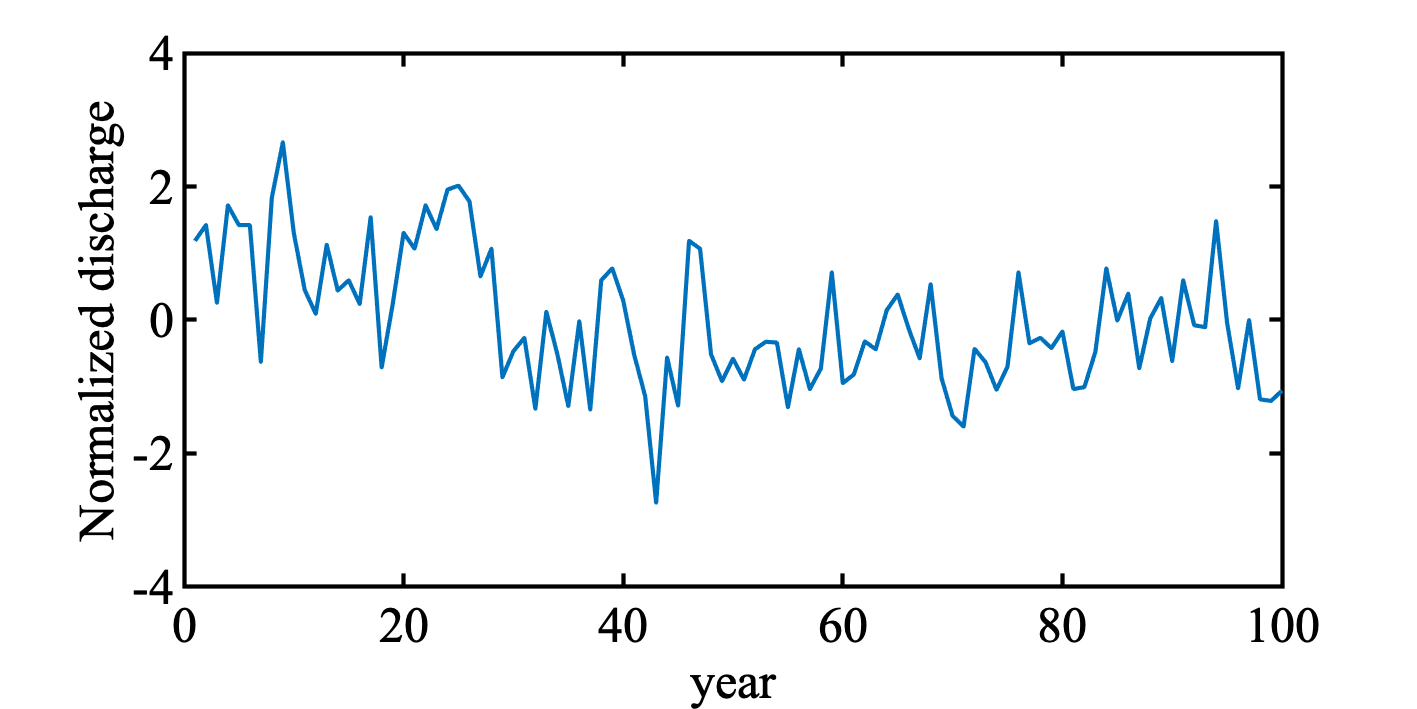
アルゴリズムを載せつつ, MATLABでコーディングしてみる. 対象データは有名なナイル川流量データ. Rに入ってるし, Kaggleとかからも取得可能. 便宜のため, 正規化した.
MATLABコード
MATLAB
y = nile;
y = normalize(y);
plot(y)
xlabel('year'); ylabel('Normalized discharge')
アルゴリズム
アルゴリズムは以下のようになる. なお, $X_{\color{#cf201f}{t+1}|\color{blue}{t}}$ のような記述は, $\color{blue}{t}$ 期までの観測に基づく, $\color{#cf201f}{t+1}$ 期の $X$ の値の推定値という意味である.
ここで,
である. また,
と与えているので, 上のアルゴリズムは計算できる.
実装
実装するには, パラメータ $\sigma^2_\ve$, $\sigma^2_\eta$, $a_1$, $P_1$ を与えなければならないけれど, 今回はまず適当に与える.
以下のコードで, アルゴリズムとできるだけ文字と統一させた.
特に, $X_{t|t}$ のようなパラメータは, X_ttのように, $X_{t|t-1}$ のようなパラメータは, X_tt1のように記した.
y = nile;
y = normalize(y);
L = length(y);
% 適当に与える
varEps = 1;
varEta = 1;
a1 = 10;
P1 = 10;
% Preallocation
a_tt1 = zeros(size(y)); a_tt1(1) = a1;
P_tt1 = zeros(size(y)); P_tt1(1) = P1;
v_t = zeros(size(y));
F_t = zeros(size(y));
a_tt = zeros(size(y));
P_tt = zeros(size(y));
K_t = zeros(size(y));
for t = 1:L
% Innovation
v_t(t) = y(t) - a_tt1(t);
F_t(t) = P_tt1(t) + varEps;
% Kalman gain
K_t(t) = P_tt1(t)/F_t(t);
% Current state
a_tt(t) = a_tt1(t) + K_t(t)*v_t(t);
P_tt(t) = P_tt1(t) * (1 - K_t(t));
% Next state
a_tt1(t+1) = a_tt(t);
P_tt1(t+1) = P_tt(t) + varEta;
end
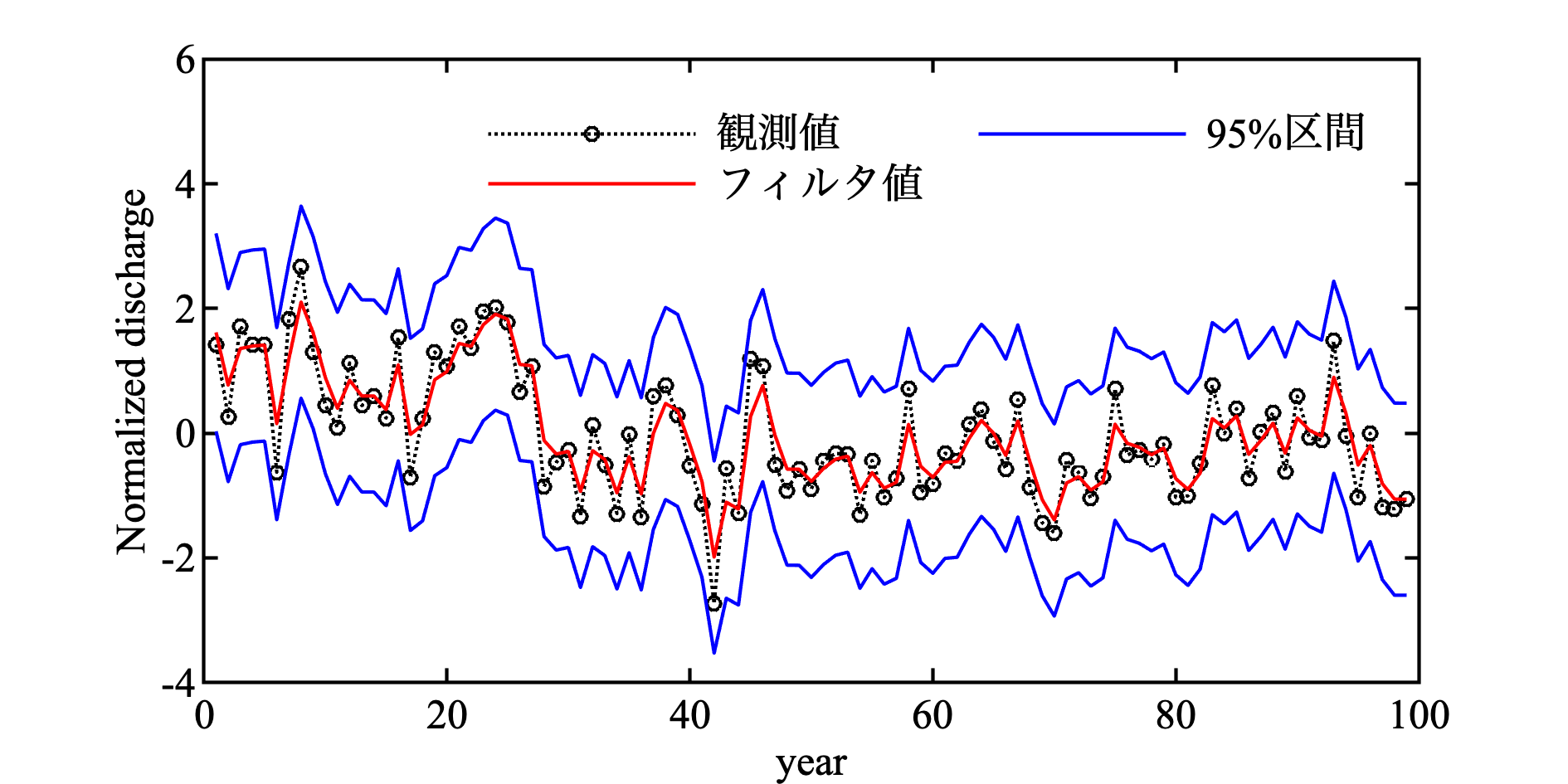
これで, フィルタリングが終わったので, 推定された状態($a_{t|t}$)と, その95%区間($a_{t|t} \pm 1.96 \sqrt{P_{t|t}}$)をみてみよう.
MATLABコード
MATLAB
plot(y(2:end), ':ko', MarkerSize=2); hold on
plot(a_tt(2:end), 'r')
plot(a_tt(2:end)+1.96*sqrt(P_tt(2:end)), 'b')
plot(a_tt(2:end)-1.96*sqrt(P_tt(2:end)), 'b')
legend('観測値', 'フィルタ値', '95%区間', box='off', Numcolumns=2)
xlabel('year'); ylabel('Normalized discharge')
ylim([-4, 6])
いい感じ. ただし, 注意としては, いい感じなのはパラメータをそれっぽく選んだからである. しかもよく見ると, データ点は100あるのに, 一つも95%区間から逸脱していないなど, よくない点もある. 次の節では, しっかりとパラメータを最尤推定する方法について述べる.
初期化とパラメータ推定
前節では, カルマンフィルタが無事計算できたものの, パラメータについては先験的にそれっぽい値を与えていた. 本節では, これらを推定する方法を実装する. 推定すべきパラメータは, $\sigma^2_\ve$, $\sigma^2_\eta$, $a_1$, $P_1$ である.
散漫なカルマンフィルタ
初期状態 $a_1$, $P_1$ を決めるに当たり, 何も情報がないと仮定し, $P_1 \rightarrow \infty$ と仮定するのは自然である. その場合, 結果的に
となり, $a_1$, $P_1$ を決める必要がなくなる.
証明(click)
上の, Innovation式より,
よって, $t = 1c$ におけるcurrent state式にこれらを代入することで,
$\square$
モデルの尤度
最尤推定を行ってパラメータを決めるために, モデルの尤度を求めよう.
初期状態 $a_1$, $P_1$ を与える場合
モデルの対数尤度 $\ell$ は,
で与えられる.
散漫な初期化を行う場合
発散を防ぐことを考慮した以下のような散漫対数尤度 $\ell_d$ が定義される.
実装
散漫なカルマンフィルタの最尤推定を行う. MATLABのOptimaizing Toolboxの, 準ニュートン法(BFGS公式)を用いて, $\sigma^2_\eta$, $\sigma^2_\ve$ に関する散漫な対数尤度を最大化する. ただ, 教科書に書かれている通り, 分散は正数しか取れないので, 以下の変換を行い探索範囲を実数値とできるようにした.
まず, メインのコード.
y = nile; y = normalize(y); varEta = 1; % σ^2_η の初期値(適当にきめた) varEps = 1; % σ^2_ε の初期値(適当にきめた) psiEta = log(sqrt(varEta)); % ψ_η に変換 psiEps = log(sqrt(varEps)); % ψ_ε に変換 % minimize loglilelihood options = optimoptions(@fminunc,'Display','iter','Algorithm','quasi-newton'); % 準ニュートン法の設定 x0 = [psiEta, psiEps]; % 探索するパラメータの初期値 f = @(x) -calcLogDiffuseLlhd(y, x); % 最小化したい函数(散漫な対数尤度の最大化なので負号をつける) xopt = fminunc(f, x0, options); % 実行 varEtaOpt = exp(2*xopt(1)) % 推定されたψ_ηをσ^2_ηに戻す varEpsOpt = exp(2*xopt(2)) % 推定されたψ_εをσ^2_εに戻す
以下, メインコードの中で使われた函数.
長いので閉じます(click)
ローカルトレンドモデルの散漫な対数尤度を求める函数.
function logLd = calcLogDiffuseLlhd(y, vars) % % ローカルトレンドモデルの散漫な対数尤度を求める函数. % y : データ % vars: 尤度に関わるパラメータ(ψ_ε, ψ_η) psiEta = vars(1); varEta = exp(2*psiEta); % σ^2_η に戻す psiEps = vars(2); varEps = exp(2*psiEps); % σ^2_ε に戻す L = length(y); % a_1, P_1の初期値 式(dissufe init.)参照のこと a1 = y(1); P1 = varEps; % カルマンフィルタリング [~, ~, F_t, v_t] = localTrendKF(y, a1, P1, varEta, varEps); % 散漫対数尤度を計算 tmp = sum(log(F_t(2:end)) + v_t(2:end).^2 ./ F_t(2:end)); logLd = -0.5*L*log(2*pi) - 0.5 * tmp; end
ローカルトレンドモデルのカルマンフィルタを行う函数.
function [a_tt, P_tt, F_t, v_t] = localTrendKF(y, a1, P1, varEta, varEps)
%
% ローカルトレンドモデルのカルマンフィルタリングを行う函数
L = length(y);
% Preallocation
a_tt1 = zeros(size(y)); a_tt1(1) = a1;
P_tt1 = zeros(size(y)); P_tt1(1) = P1;
v_t = zeros(size(y));
F_t = zeros(size(y));
a_tt = zeros(size(y));
P_tt = zeros(size(y));
K_t = zeros(size(y));
% Filtering
for t = 1:L
% Innovation
v_t(t) = y(t) - a_tt1(t);
F_t(t) = P_tt1(t) + varEps;
% Kalman gain
K_t(t) = P_tt1(t)/F_t(t);
% Current state
a_tt(t) = a_tt1(t) + K_t(t)*v_t(t);
P_tt(t) = P_tt1(t) * (1 - K_t(t));
% Next state
a_tt1(t+1) = a_tt(t);
P_tt1(t+1) = P_tt(t) + varEta;
end
end
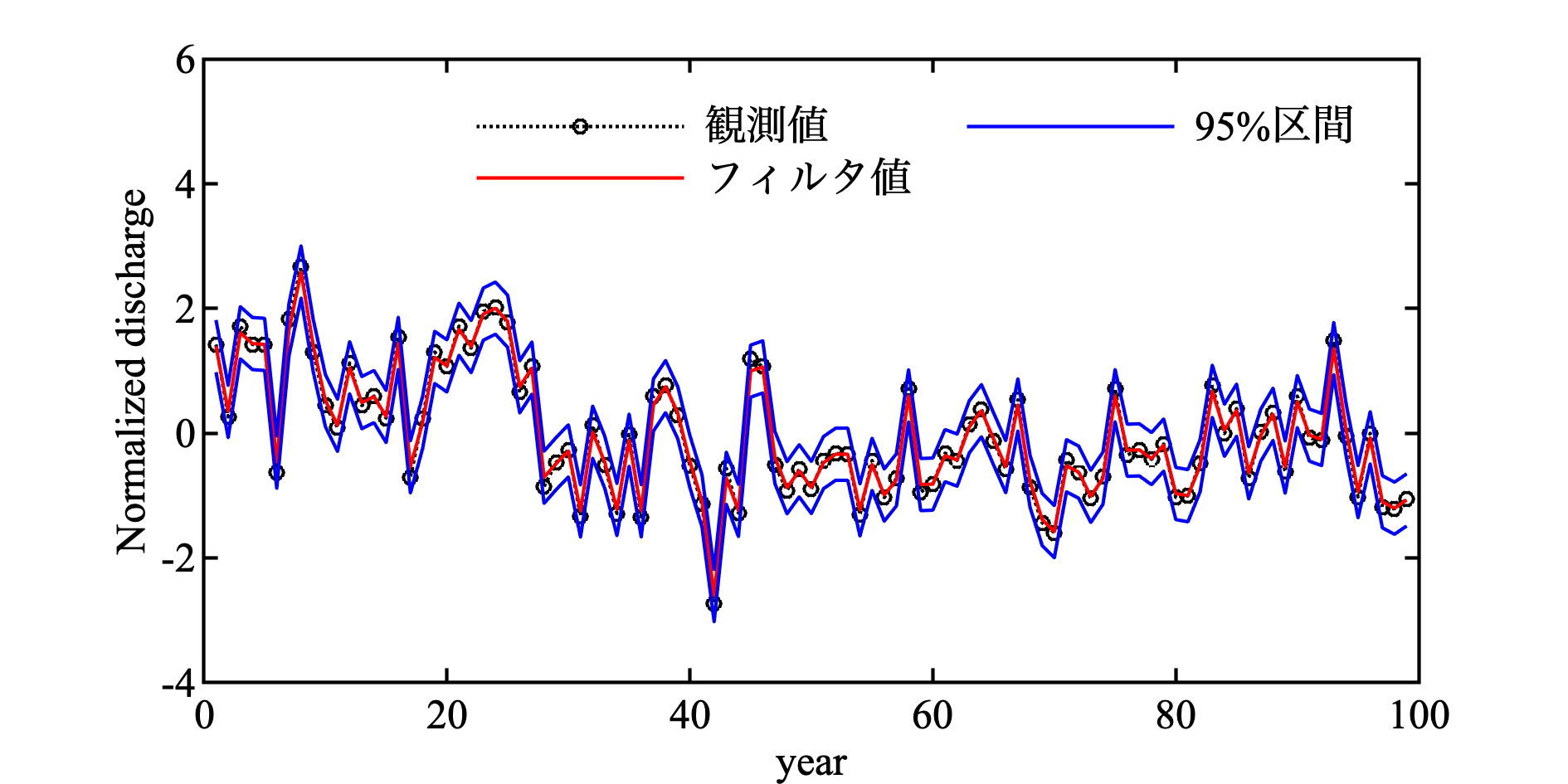
計算結果, $\sigma^2_\eta = 0.0494$, $\sigma^2_\ve = 0.5307$ となった. これらを, パラメータとしたカルマンフィルタを行い, 結果を見てみる.
MATLABコード ( click )
MATLAB
varEps = varEtaOpt;
varEta = varEpsOpt;
a1 = varEps;
P1 = varEta;
[a_tt, P_tt, ~, ~] = localTrendKF(y, a1, P1, varEta, varEps);
plot(y(2:end), ':ko', MarkerSize=2); hold on
plot(a_tt(2:end), 'r')
plot(a_tt(2:end)+1.96*sqrt(P_tt(2:end)), 'b')
plot(a_tt(2:end)-1.96*sqrt(P_tt(2:end)), 'b')
legend('観測値', 'フィルタ値', '95%区間', box='off', Numcolumns=2)
xlabel('year'); ylabel('Normalized discharge')
ylim([-4, 6])
どうもきれいすぎる(フィルタリングがデータを追いすぎている)気がする. じきに, 再確認します.
主な参考文献
野村 カルマンフィルタ ―Rを使った時系列予測と状態空間モデル― (統計学One Point 2)
北川 Rによる 時系列モデリング入門萩原ら 基礎からわかる時系列分析―Rで実践するカルマンフィルタ・MCMC・粒子フィルタ― Data Science Library