ジョルダン標準形
最終更新:2021/07/15
我々工学系の人間にとって, 線形代数という講義の最終目標はJordan標準形であろう. 私も, 今ひとつ理解しないまま単位をとった覚えがあるが ( 試験にはでなかった ) , 最近 線型代数学(新装版) (数学選書) を読んで, その面白さと教育的な内容に感動したので, まとめてみようと思う.
もちろん, この本の証明は美しく, 私に文句をつけられるものではない. しかしこの教科書では, 行列の標準化という節のなかで, 例の1つとしてJordan標準形が挙げられており, 他にも色々な例や定理が混在している. よって, このウェブページでは, Jordan標準形へ一直線に向かった記述をしてみようと思う. また, 話の流れがわかりやすいように, 定理の長い証明は折りたたんでいる.
黒字は, そこそこに参考文献の裏付けがある. 青字は, 私によって埋められた行間など ( その分正確性に欠けうる ) . 非専門家が書いています. 十分に批判的に読んで頂くようお願いいたします. 間違い・疑問点などあれば, ぜひコンタクトフォームへ連絡いただけると幸いです.
いくつかの定義
いくつか, 証明で使う用語を挙げる. あまり詳しく説明しない.
基底変換
$V$ を $n$ 次元ベクトル空間, $\vecseq{\bm{a}}{1}{n}$ をその1つの ( 基 ) 底とする. このとき, 任意の $\bm{x} \in V$ は
で一意に表される. 一方, $V$ に, $\vecseq{\bm{a}^{\prime}}{1}{n}$ という別の基底をとる. このときもちろん, 任意の $\bm{x} \in V$ は
で一意に表される. このとき,
とすれば, $P = (p_{ij})$ を底の変換:$(\bm{a}_{i}) \longrightarrow (\bm{a}_{i}^{\prime})$ の行列という.
行列の相似
底の変換行列 $P$ を用いて以下のように表される関係を持つ2つの行列 $A$, $A^\prime$ は「相似である」といい, $A \sim A^\prime$ と記す. この関係は同値律をみたす ( 今回の記事では必要ではない ) .
冪零行列
ある $\nu$ に対して $A^{\nu} = 0$ となる $n$ 次正方行列を冪零行列という. つまり, 何回かかけると零になってしまう行列である.
$A$−不変
$A$ を与えられた $n$ 次行列とする. $V^n$ ( $n$ 次元ベクトル空間 ) の部分空間 $W$ が,
となるとき, $W$ は $A$ に関して不変である, または $W$ は$A$−不変である, という. 例えば, $\bm{x}$ が $A$ の固有空間だとすると,
がなりたつので, $\{\{\bm{x}\}\}$ ( $\bm{x}$ で張られる空間 ) が$A$−不変である.
狭義・広義固有空間
我々にとって, 馴染みが深い固有空間は「狭い意味の固有空間」である. つまり, ある行列 $A$ の1つの固有値 $\alpha$ に対して, 固有ベクトルと $\bm{0}$ が張る空間のことである. これを $W_{\alpha}$ と記す.
一方, 一般にある十分に大きい $l$ に対して,
となるような $\bm{x} \in V^{n}$ 全体の集合を固有値 $\alpha$ に対する「広い意味の固有空間」といい, $\widetilde{W}_{\alpha}$ と表す. もちろん, $W_{\alpha}$ を構成する $\bm{x}$ に対しては, 上式が $l = 1$ で成り立つ.
補題
補題1
$f_1(x), \ldots , f_s(x)$ を全体として共通因子を持たない多項式とすれば,
となるような $s$ 個の多項式 $M_1(x), \ldots , M_s(x)$ が存在する.
証明 ( click )
この補題の内容自体は, 線型代数の内容というよりより環論の範疇だと思う. イデアルや体といったキーワードで調べるとより一般化された証明がある.
$M_i(x)\;(i = 1, \ldots, s)$ を任意の多項式とし,
なる形で表される多項式 $g(x)$ の全体を $\mathfrak{A}$ とする. これは, 以下の性質をもつ.
- $g_1(x), g_2(x) \in \mathfrak{A} \Longrightarrow g_1(x) + g_2(x) \in \mathfrak{A},$
- $g(x) \in \mathfrak{A},\;{}^{\forall}M(x) \Longrightarrow M(x)g(x) \in \mathfrak{A}.$
今, $\mathfrak{A}$ に属する多項式 ( $\neq 0$ ) のうち, 次数が最低のものを $g_0(x)$ とする. これで, 任意の $g(x) \in \mathfrak{A}$ をわると,
とかけて, $g(x), g_0(x) \in \mathfrak{A}$ なので, i), ii) より $h(x) \in \mathfrak{A}$. しかも, 上の多項式の割り算よりあきらかに, $h(x)$ の次数 $\lt g(x)$ の次数である. ところが, $g_0(x)$ の決め方を思い出すと, $h(x) = 0$ でしかありえない. つまり, $g(x) = M(x)g_0(x)$, 則ち $\mathfrak{A}$ は $g_0(x)$ の倍数全体の集合と一致する.
今, $f_i(x) \in \mathfrak{A}\;(i = 1, \ldots, s)$ であるから, $g_0(x)$ は $f_1(x), \ldots, f_s(x)$ の公約数である. 一方, $g_0(x) \in \mathfrak{A}$ であるから,
と表される ( 証明の一文目をみよ ) . よって, $g_1(x)$ を $f_1(x), \ldots, f_s(x)$ の任意の公約数とすれば, 上式の両辺が $g_1(x)$ で割れるということなので, $g_1(x)$ は $g_0(x)$ の約数である. すなわち, $g_0(x)$ は $f_1(x), \ldots, f_s(x)$ の最大公約数である.
さて, 仮定より $f_1(x), \ldots, f_s(x)$ の最大公約数は $1$ であるので, $g_0(x) = 1$ としてよく, \eqref{ideal} における $M_i(x)$ が求める多項式である.
$\blacksquare$
Jordan標準形の証明
標準化とは??
行列の標準化とはなにか, これを私の言葉で簡単に述べてみる.
ある行列 $A$ があるとき, うまい基底変換をほどこして綺麗な形, 扱いやすい形にしたい. 理想は, 対角行列にすることである. しかし, 全ての行列が対角化可能 ( 準単純 ) ではない. 一方, 例えば全ての行列を三角行列にすることはできるとわかっている ( 三角化 ) . これが限界だろうか?
実は, 全ての行列は対角化可能 ( 準単純 ) な行列と冪零行列に分解することができる. しかも, 冪零行列には三角化以上の標準化を施すことができて, より単純な形 ( 冪零行列の標準形 ) にすることができる. 則ち, 全ての行列に対して, うまい基底変換をみつけて, 対角行列+冪零行列の標準形という形の標準形にすることができる. これがJordan標準形である.
$V^n$ の$A$−不変な部分空間への分解
$A$ を与えられた $n$ 次行列とする. もし, $W \in V^n$ が$A$−不変だとする. 今, $V^n$ の底 $\vecseq{\bm{a}}{1}{n}$ を, $\vecseq{\bm{a}}{1}{m}\,(m = \dim W)$ となるようにとると,
と表される. なぜなら, $\vecseq{\bm{a}}{1}{n}$ は, $V^n$ の底なので, $n$ 次行列 $A$ で写された先も, $\vecseq{\bm{a}}{1}{n}$ の線型結合で表される. しかし, $\vecseq{\bm{a}}{1}{m}$ は, $A$−不変なので, $\vecseq{\bm{a}}{m+1}{n}$ を含まない ( 係数が $0$ ) の空間に写される ( $A^{(1)}, 0$ で表現されている ) . 残りの $\vecseq{\bm{a}}{m+1}{n}$ は$A$−不変とは限らないので, $A$ で写された先も $\vecseq{\bm{a}}{1}{n}$ の係数は $0$ とは限らない ( $A^{(12)}, A^{(2)}$ で表現されている ) .
上式は, 底の変換:$(\bm{e}_{i}) \longrightarrow (\bm{a}_{i})$ により,
となる. なぜなら, 行列 $A$ は, 底の変換:$(\bm{e}_{i}) \longrightarrow (\bm{a}_{i})$ の行列にほかならないからである.
さて, ここでもし, $V^n = W_1 \oplus W_2$ , つまり$A$−不変な部分空間 $W_1$, $W_2$ の直和に分解されれば, $V^n$ の底 $\vecseq{\bm{a}}{1}{n}$ を,
- $\vecseq{\bm{a}}{1}{m}$ は $W_1$ の底,
- $\vecseq{\bm{a}}{m+1}{n}$ は $W_2$ の底.
となる. これは, うまい底の変換の行列をみつけて, $A$ を
と標準化できることを示している. そして, そのためには, $V^n$ が, $A$−不変な部分空間の直和に分解することができなければならない. そのようなことがいつでもできるだろうか? それを保証するのが, 次の定理である.
定理1:固有空間への分解
$n$ 次行列 $A$ の相異なる固有値を $\vecseq{\alpha}{1}{s}$ とし,
とおけば ( $l$ は十分大 ) , $V^n$ は, これら ( つまり広い意味の固有空間 ) に直和分解される.
$\alpha_i$ の重複度を $n_i$ とすれば,
である.
固有空間に直和分解されることの証明 ( click )
$V^n$ が直和分解できること
$A$ の固有多項式 $f_A(x)$ は, $|A - xE|$ である.
これを, 相異なる一次因数の冪の積に分解する.
とする. さらに, 以下のように $f_i(x)$ を定義する. これらは共通因子を持たない.
よって, 補題1により, ある $M_1(x), \ldots, M_s(x)$ があって,
となる. ここで, $x = A$ を代入して,
補題1の証明で $x$ を $A$ で置き換えて考えて, 共通因子をもたない行列多項式の最大公約数は $E$ ( 単位行列 ) だから上式がなりたつ, という考え方でよいのだろうか? ここでさらに, $A_i = M_i(A)f_i(A)$ とおくと,
ここで,
である. なぜなら, \eqref{xxx} より, $A_iA_j \;(i \neq j)$ は必ず $f_A(A)$ を因数にもつが, Hamilton-Cayleyの定理 ( $f_A(A) = 0$ ) より, 上式がなりたつ. \eqref{yyy}, \eqref{zzz} より,
がなりたち, これは, $A_i$ が冪等行列であることを示している. 冪等行列があれば, $V^n$ は, 部分空間
の直和に分解される. 冪等行列の基本的な性質で, 証明略.
$A_i V^n$ が $\widetilde{W}_{{\alpha}_{i}}$ と一致すること
① $A_i V^n \subset \widetilde{W}_{{\alpha}_{i}}$ を示す.
$f_i(x)$ の定義\eqref{xxx}より,
よって, $x = A$ を代入し, Hamilton-Cayleyの定理 ( $f_A(A) = 0$ ) より,
両辺に $M_i(A)$ をかけて, $A_i = M_i(A)f_i(A)$ を思い出すと,
よって, $A_i V^n \subset \widetilde{W}_{{\alpha}_{i}}$.
② $A_i V^n \supset \widetilde{W}_{{\alpha}_{i}}$,
つまり $\bm{x} \in \widetilde{W}_{{\alpha}_{i}} \Rightarrow \bm{x} \in A_i V^n$ を示す.
$\bm{x} \in \widetilde{W}_{{\alpha}_{i}}$ とすると, ある $l$ に対して $(A - \alpha_i E)^{l}\bm{x} = 0$.
\eqref{www} より, $(x - \alpha_i)^{l}$ と $M_i(x)f_i(x)$ とは共通因子をもたない.
( 理由. もし共通因子をもつなら, 共通因子は $x - \alpha_i$ であるが, $f_i(x)$ の定義より $M_i(x)f_i(x)$ のなかで $x - \alpha_i$
を因子として持ちうるのは $M_i(x)$ である.
しかし, もしそうだとすると, そもそも $f_j(x)\;(i \neq j)$ が $x - \alpha_i$ を因子として持つため,
\eqref{www} の左辺は $x - \alpha_i$ で割り切れることになってしまう. )
よって, 補題1よりある多項式 $M(x)$, $N(x)$ があって,
即ち,
ゆえに, $\bm{x} \in A_i V^n$.
$\blacksquare$
重複度に関する部分の証明 ( click )
$\dim{\widetilde{W}_{{\alpha}_{i}}} = n_i^{\prime}$ とする. そもそも, $\widetilde{W}_{{\alpha}_{i}}$ は$A$−不変であったので, 直和分解\eqref{dpdecomp}に即して底をとり, \eqref{dpdecomppre} と同じようにすることで,
となる. ここで, $A^{(i)}$ は $A$ が $\widetilde{W}_{{\alpha}_{i}}$ に引き起こす一次変換を表す $n_i^{\prime}$ 次の行列である. いま, $n_i^{\prime}$ 次単位行列を $E_{n_i^{\prime}}$ とすれば, \eqref{wideEigSpDef} により, $N_i = A^{(i)} - E_{n_i^{\prime}}$ は冪零. また, 冪零行列の固有値は, 明らかに $0$ だけであるので, $n$ 次冪零行列 $A$ の固有多項式 $f_A(x) = x^n$ となることを踏まえ,
より,
よって, \eqref{aaa} より,
よって, $n_i^{\prime} = n_i$ でなければならない.
$\blacksquare$
これで,
となることがわかった. つまり, $A$ をさらに分解するには, 各 $A^{(i)}$ の分解について考えればよい.
今, $k = 1, 2, \ldots$ に対し,
とおく. すなわち, $W_{\alpha_i}^{(k)}$ は $\widetilde{W}_{{\alpha}_{i}}$ の部分空間で, あと $k$ 回以上 $A - \alpha_i E =: N_{i}$ をかけると $\bm{0}$ となるような部分である. なので, 明らかに
だし, 十分大きい $l$ にたいして, $W_{\alpha_i}^{(l)} = \widetilde{W}_{{\alpha}_{i}}$ となる.
今, $\widetilde{W}_{{\alpha}_{i}}$ の底は $\vecseq{\bm{a}}{1}{n_i}$ であり, $\dim W_{\alpha_i}^{(k)} = n_{i}^{(k)}$ とする. さらに, $k = 1, 2, \ldots$ に対し, $\vecseq{\bm{a}}{1}{n_{i}^{(k)}}$ が $W_{\alpha_i}^{(k)}$ の底になるようにとる. このとき, $N_i W_{\alpha_i}^{(k)} \subset W_{\alpha_i}^{(k-1)}$ ( 複雑だが, ことばでかくと, "「 $N_i$ を $k$ 回以上かけると $\bm{0}$ になる空間 $\times N_i$ 」$\subset$「 $N_i$ を $k-1$ 回以上かけると $\bm{0}$ になる空間」" ) . よって,
複雑だが, 少し詳しく書く. 左辺は,
であるが, $\color{red}{\bm{a}_{1}, \ldots , \bm{a}_{n_{i}^{(1)}}}$ の底は あと一回 $N_i$ をかけると $0$ になる 空間の底なので, $N_i$ をかけられることで, すべての係数が $\bm{0}$ となる. それが右辺の行列の1列目が表している. つぎに, $\color{green}{\bm{a}_{n_{i}^{(1)} + 1}, \ldots, \bm{a}_{n_{i}^{(2)}-1}}$ は, あと二回 $N_i$ をかけると $\bm{0}$ になる 空間の底なので, $N_i$ をかけられることで, 「あとあと一回 $N_i$ をかけると $\bm{0}$ になる空間の底」以外の係数が $0$ になる. それが右辺の行列の2列目が表している. 同様の関係の繰り返しが, 右辺の行列を生み出す.
これで, 各 $N^{(i)}$ を, \eqref{dzeroTriangle}の右辺の「対角線まで込めて左下半分が $0$ であるような三角行列」で表す底の変換があるとわかった. いま, $A - \alpha_i E = N_{i}$ であったので,
則ち, \eqref{semidiag}の各 $A^{(i)}$ を, \eqref{dEigenTriangle}の右辺の形の行列で表す底の変換があるとわかった. だいぶJordan標準形に近づいてきたのではないだろうか.
定理2:冪零行列の標準形
$N$ が冪零行列ならば, $N$ は
なる形の行列をいくつか並べてできる行列に相似である.
証明 ( click )
$N$:冪零行列, $N^{\nu - 1} \neq 0$, $N^{\nu} = 0$, つまり, $N$ を $\nu$ 回掛けるとゼロになる冪零行列とする.
とすると, もちろん全ての $\bm{x}\in V^n$ に対して $N^{\nu}\bm{x} = \bm{0}$ なので $V^n = W^{(\nu)}$で,
今, $\dim{W^{(i)}} = m_i$, $m_i - m_{i-1} = r_i\; (i = 1, \ldots ,n)$, $m_0 = 0$, とおく. つまり, 上の式になぞらえてかくと,
ここで, $W^{(i-1)}$ の任意の基底に $m_i - m_{i-1} = r_i$ 個のベクトル $\vecseq{\bm{a}}{1}{r_{\nu}}$ を付け加えて $W^{(i)}$ の基底になるようにできる. つまり,
このとき,
ゆえに $\vecseq{N\bm{a}}{1}{r_{\nu}} \in W^{(\nu-1)}$ である. ここで, 以下がなりたつ.
- $\vecseq{N\bm{a}}{1}{r_{\nu}}$は一次独立.
- $ \{\{ \vecseq{N\bm{a}}{1}{r_{\nu}} \}\} \cap W^{(\nu-2)} = \bm{0}$
なぜなら, $c_1N\bm{a}_1 + \cdots + c_{r_{\nu}}N\bm{a}_{r_{\nu}} ( \in W^{(\nu-2)} ) = \bm{0}$ とすれば,
すなわち, $c_1\bm{a}_1 + \cdots + c_{r_{\nu}}\bm{a}_{r_{\nu}} \in W^{(\nu-1)}$. ところが, \eqref{nustar}より, $c_1\bm{a}_1 + \cdots + c_{r_{\nu}}\bm{a}_{r_{\nu}}$ は, $\bm{0}$ 以外の $W^{(\nu-1)}$ の元たりえない. 今, $\vecseq{\bm{a}}{1}{r_{\nu}}$は一次独立であることを思い出すと, $c_1 = c_2 = \cdots = c_{r_{\nu}} = 0$ とわかる.
ここまでのことにより, $r_{\nu} \leq r_{\nu-1}$ である.
少しまとめるために, 今 $W^{(\nu)} \supset W^{(\nu-1)} \supset W^{(\nu-2)}$ だけに注目する.
それぞれの次元の関係は, $m_{\nu} \geq m_{\nu-1} \geq m_{\nu-2}$ でその差分は, $r_{\nu}$, $r_{\nu-1}$ であった.
\eqref{nustar}より, $\vecseq{\bm{a}}{1}{r_{\nu}}$ は $W^{(\nu)}$ の基底であるが $W^{(\nu-1)}$ の基底ではない $r_{\nu}$ 個のベクトルであった.
では, $\vecseq{N\bm{a}}{1}{r_{\nu}}$ の $r_{\nu}$ 個のベクトルはどこに属するだろうか?
これは, $W^{(\nu-1)}$ に属するので, 再び\eqref{nustar}より $\{\{ \vecseq{\bm{a}}{1}{r_{\nu}} \}\}$ には属さないし, $ \{\{ \vecseq{N\bm{a}}{1}{r_{\nu}} \}\} \cap W^{(\nu-2)} = \bm{0}$ より $W^{(\nu-2)}$ にも属さない.
即ち, $\vecseq{\bm{a}}{r_{\nu}+1}{r_{\nu-1}}$ の $r_{\nu-1}$ 個の基底で張られる空間に属する.
これから, $r_{\nu} \leq r_{\nu-1}$ がわかる.
したがって, $r_{\nu-1} - r_{\nu}$ 個のベクトル $\vecseq{\bm{a}}{r_{\nu}+1}{r_{\nu-1}}$ を適当に取れば,
$W^{(\nu-2)}$ の基底に $\vecseq{N\bm{a}}{1}{r_{\nu}}, \vecseq{\bm{a}}{r_{\nu}+1}{r_{\nu-1}}$ を付け加えて $W^{(\nu-1)}$ の基底になるようにできる.
このとき,
\eqref{nain}とその下の命題と同じようにして,
は一次独立かつ,
である. よって, $r_{\nu-1} \leq r_{\nu-2}$. これを繰り返して,
でありさらに,
となる. ここまででわかったことをまとめると, 以下のような図にできる.
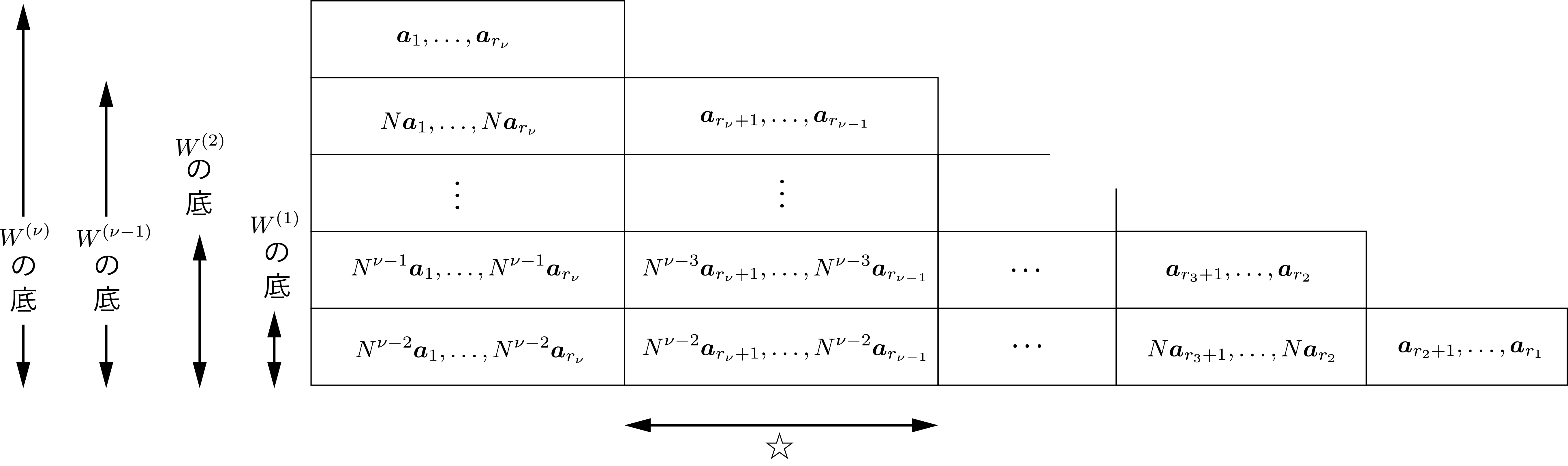
この図に入っているベクトル全体が $V^n$ の基底であるので, $V^n$ の基底全体は次のように表される.
さて, $r_{i+1} +1 \leq j \leq r_i$ に対して,
は明らかに$N$-不変な部分空間である.
ここで, 今度は上の図を縦に切ってみていることになる.
例えば, $i = r_{\nu-1}$ のときは, 上図の☆印のエリアを対象としている.
このエリアには, $r_{\nu-1} - r_{\nu} (\geq 0)$ 個のベクトルが入った部屋が縦に $\nu-1$ 段並んでいるように描かれているが, 見方をかえれば,
$\nu-1$ 個のベクトルが横に $j = 1, \ldots, r_{\nu-1} - r_{\nu}$ 本並んでいるようにみえる.
その一本一本が張る空間を \eqref{tatetate} は示している.
例えば, $j=1$ のときに張られる空間は $\{\{ \bm{a}_{r_{\nu}+1}, N\bm{a}_{r_{\nu}+1}, \ldots, N^{\nu-2}\bm{a}_{r_{\nu}+1} \}\}$ であるので, この空間の元はこれらの一次結合で表される.
それに $N$ を掛ければ, 再び元の空間に属する ( $N$-不変 ) ことは明らかだろう.
この底 ( $\{\{ \bm{a}_j, N\bm{a}_j, \ldots, N^{i-1}\bm{a}_j \}\}$ ) に関して $N$ を表せば,
となる. これは,
であることを示す. ところで, $V^n$ は ( 上の図よりもわかるように ) \eqref{tatetate}のいくつかの直和に分解されるのだった. よって $N$ は
なる形の行列をいくつか対角に並べてできる行列に相似である.
$\blacksquare$
これを, \eqref{dEigenTriangle}の $N_i$ に適用すれば, $A$ は
なる形の行列を幾つか並べてできる行列に相似であるとわかる. ここで行っているのは, うまい底の変換行列 $P$ をとってくることができて, $P^{-1}N_{i}P = \eqref{jordanBlock}$ ということ. これを, \eqref{dEigenTriangle}の左辺に適用すると,
となる.
このような形の行列をJordanの標準形という.
おまけ
以下の授業動画内で, Jordan標準形が数値計算の役に立つのかという点について言及されている. 短いけれど面白いので, おすすめ. 結論から言うと, 役立たせるのは難しいらしい. 固有値問題の導入
主な参考文献
名著として誉れ高い, 佐武線型代数. 線型代数学(新装版) (数学選書) 第五章テンソル代数だけ読んでいなかったので, この記事を機にテンソル代数へ進んでみようと思う.
昔, 理学部の線型代数の授業をうけたとき, 6回目の講義くらいで線型代数の終わりが告げられ, 単因子論という分野に突入し, 私は沈没した. テンソル代数というのは, たぶん, 単因子論につながってゆくのだと思う.
もちろん, ここでは説明していないJordan標準形に関することも書かれているので是非よんでほしい.